"Rennsemmeln" zügeln
Vorschlag zur Reduzierung der Höchstgeschwindigkeit bei N-Bahn Loks von Michael Peters.
Anzeige:

Allgemeines
Die Reduzierung der Höchstgeschwindigkeit von N-Bahn Loks im Analogbetrieb lässt sich im wesentlichen mit drei Maßnahmen durchführen:
-
Begrenzung der maximalen Motorspannung
-
Tausch des Motor gegen einen mit niedrigerer Drehzahl bei Nennspannung
-
Getriebeänderung
Es gibt kein Patentrezept, welche Maßnahme oder Kombination von Maßnahmen in welcher Reihenfolge durchzuführen ist, um den gewünschten Erfolg zu erzielen. Ich bin zu "Analogzeiten" im wesentlichen nach folgender Tabelle vorgegangen:
Geschwindigkeits-Überhöhung |
Basis-Maßnahme |
erweiterte Maßnahmen |
0 - 20 % |
Bei guter Drehzahlcharakteristik keine Maßnahme. |
Glockenankermotor bei Stromaufnahme >200 mA. |
20 % - 50 % |
Elektrische Reduzierung der Motorspannung um max. 3 V bei guter Drehzahlcharakteristik. |
Einbau Glockenankermotor und Reduktion der Motorspannung um max. 2 V |
50 % - 100 % |
Einbau Glockenankermotor und Reduktion der Motorspannung um max. 4 V. |
Nahe der 100 %-Marke Einbau, sonst Einbau von Glasmachers Schnecken. |
mehr als 100 % |
Einbau von Glasmachers Schnecken und Reduktion der Motorspannung. |
Einbau eines Glockenankermotors, Einbau von Glasmachers Schnecken und Reduktion der Motorspannung. |
Wichtig: Die alleinige Reduzierung der Motorspannung mit elektronischen Bauteilen sollte bei Standardmotoren nicht mehr als 4 V ausmachen, da sonst der Motor "kraftlos" wirkt. Kleine Elektromotoren tun alles gerne - nur nicht langsam drehen.
Strategien zur Reduzierung der Höchstgeschwindigkeit von N-Loks
mit elektronischen Bauteilen im Analogbetrieb
Kleine Standard-Elektromotoren in N-Bahnlokomotiven drehen bei Nennspannung (12 V) bis zu
40.000 rpm (!), in Verbindung mit gering übersetzten Getrieben ergeben sich um 2- bis 3-fach überhöhte Geschwindigkeiten der Lokomotiven oder teilweise sogar noch mehr.
Die einfachste Methode, die Geschwindigkeit bei maximal vorgegebener Gleisspannung mit elektronischen Bauteilen zu reduzieren, ist der Einbau von Dioden in den Motorstromkreis (Bild 1a u. 1b).
Bild 1a: In Durchlassrichtung reduziert jede Diode die Motorspannung um ca. 0,6 V. Um eine Spannungsreduktion von 2,4 V zu erzielen, sind also vier Dioden in Reihe zu schalten, zuzüglich vier Dioden antiparallel für die andere Fahrrichtung. Diese acht Dioden vom Typ 1N40xx sind kaum in der Lok unterzubringen. Nimmt man dafür jedoch SMD-Dioden vom Typ BAV99 hat man vielleicht mehr Glück.
Bild 1b: Alternativ kann man auch eine Kombination der SMD-Diode BAV99 und zwei Z-Dioden wählen, so dass nur drei Bauteile in der Lok unterzubringen sind. Zu beachten ist allerdings die Wärmeentwicklung der Z-Dioden (P = UZ x Imotor).
In Bild 2 habe ich ein Oszillogramm dieser Schaltung dargestellt Der Motor wurde bei der Messung durch einen Widerstand ersetzt.
Vorteile dieser Schaltungen:
Mit einfachsten elektronischen Bauteilen lässt sich eine Geschwindigkeitsreduktion erzielen. Die Spitzenbeleuchtung ist auch schon bei niedrigeren Lokgeschwindigkeiten heller.
Nachteile dieser Schaltungen:
Die Anfahrspannung wird deutlich heraufgesetzt und ist für alle Loks unterschiedlich (bei geglätteter Gleichspannung, bei Standardtrafos / PWM-Fahrreglern kann das anders aussehen). Alle Loks auf einer Anlage müssen angepasst werden. Die Wärmeentwicklung der Z-Dioden ist nicht unproblematisch (Achtung: Gefahr von Lokgehäusedeformation!).
Bild 2: Oszillogramm einer Reduktionsschaltung mit Z-Dioden.
Alternativ zu den Diodenschaltungen kann man eine bipolare Spannungsbegrenzung (Bild 3a) ähnlich einem Konstantspannungsnetzteil mit diskreten Bauteilen einsetzen. Hier wird nicht die Anfahrspannung heraufgesetzt, sondern die maximale Ausgangsspannung durch den Wert der Z-Diode begrenzt. Die Doppeldioden BAV99 (D1 und. D2) sorgen für den richtigen Stromfluss bei Vorwärts- und Rückwärtsfahrt. Bei konsequenter Verwendung vom SMD Bauteilen ist eine solche Schaltung nicht viel größer als ein Digitaldecoder (Bilder 3b und 3c). Die Schaltung in Bild 3b ist für Motorströme bis 100 mA und die in Bild 3c bis 250 mA einsetzbar.
Bild 3a: Schaltung zur Spannungsbegrenzung, Uout~ UZD
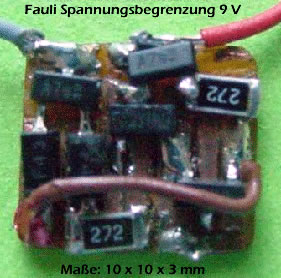
Bild 3b: Faulhaber Spannungsbegrenzung 9 V, Maße: 10 x 10 x 3 mm

Bild 3c: Spannungsbegrenzung 8 V, Maße: 13 x 17 x 4 mm
Die maximale Ausgangsspannung ist ungefähr gleich der Zenerdiode-Spannung.
Vorteil der Transistorschaltung:
Die Schaltung entkoppelt in der Auslaufphase den Motor von anderen am Gleis angeschlossenen Verbrauchern. Sie ist insbesondere für Motoren mit großer Schwungmasse und für Glockenankermotoren geeignet.
Nachteile der Schaltung:
Die Platinen müssen selbst geschnitzt (so habe ich es gemacht) oder geätzt werden.
Wählt man in den beiden Stromzweigen nach Bild 1b und 3a unterschiedliche Werte für die Z-Dioden, so lassen sich für Vorwärts- und Rückwärtsfahrt unterschiedliche maximale Geschwindigkeiten einstellen - z.B. bei Dampfloks.
Bild 4 verdeutlicht die unterschiedliche Wirkungsweise der beiden Ansätze "Diodenschaltung" und "Transistorschaultung" zur Geschwindigkeitsreduktion.
Vorbereitungen (alle Messungen mit geglätteter Gleichspannung):
-
Die Geschwindigkeit bei 12 V der umzubauenden Lok muss exakt bestimmt werden. Unter der fälschlichen Annahme einer linearen Beziehung zwischen Motorspannung und Drehzahl (diese gilt allerdings für Glockenankermotoren) errechnet man den Wert, um wieviel Volt die Motorspannung zu reduzieren ist (oder auf wieviel Volt zu begrenzen), um eine vorbildgerechte Geschwindigkeit zu erzielen. Aber bitte nicht wundern: der verbleibende Regelbereich kann bei manchen Modellen nur 2 bis 3 Volt betragen. Oder man misst die Spannung, mit der die Lok vorbildgerecht fährt.
-
Messung der Stromaufnahme des Motors bei 12 V und Erreichen der Haftreibungsgrenze der Räder. Dazu muss die Spitzenbeleuchtung abgeklemmt sein oder die Stromaufnahme der Spitzenbeleuchtung muss separat bestimmt und vom Gesamtstrom abgezogen werden. Der reine Motorstrom wird für die Bauteiledimensionierung (Verlustleistung der Z-Dioden nach Bild 1b oder der Transistoren nach Bild 3a) benötigt. Für die Z-Dioden gilt: P=UZ x Imotor, für die Transistoren gilt:
P= [(UC - UE)] x Imotor. Für UC ist in der Regel 12 V und für UE die errechnete Motorspannung einzusetzen.
Stromquellenschaltung (einfach):
"Variable" Z-Diode:
In Bild 5 ist die Schaltung einer "variablen" Z-Diode dargestellt, die z.B. in Langsamfahrabschnitten eingesetzt werden kann.
Als Zugabe hier noch eine Schaltung zur Entkopplung von Glockenankermotoren:
Entkopplung für Faulhabermotoren:
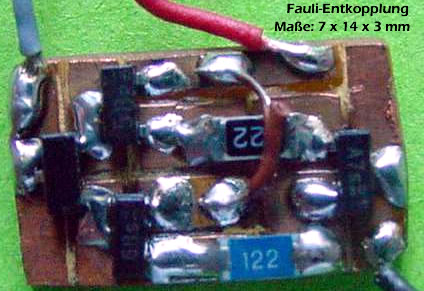

Zum Größenvergleich ein Auslaufmodul der Fa. sb-Modellbau. Ob es allerdings auf der oben. abgebildeten Schaltung basiert, weiß ich nicht.
Nachsatz:
Alle hier vorgestellten Schaltungen funktionieren - ich hatte sie selbst bei meinen Loks im Analogzeitalter eingebaut. Die Transistorschaltung basiert auf einer Idee von Herrn Wolfgang Horn, der sie für Wageninnenbeleuchtungen eingesetzt hat. Gleiches gilt für die Entkopplungsschaltung für Glockenankermotoren.
Viel Spaß beim Basteln!
Bauteile:
SMD Z-Dioden: MMSZ52-Serie Gehäuse SOD123
axiale Z-Dioden ZPY-/BZX-Serie 1,3W
ZPD-Serie 0,5W
Dioden 1N40XX 1A
BAV99 0,25A
Transistoren:
NPN BC817, 0,5A/0,25W, Gehäuse SOT23
FZT853, 6A/3W, Gehäuse SOT223
PNP BC807, 0,5A/0,25W, Gehäuse SOT23
FZT951, 5A/3W, Gehäuse SOT223
Danke an Michael Peters für den Artikel.
Das sagen User zu diesem Thema (4 Beiträge):
ein paar Anmerkungen:
zu Bild 1b: das geht auch einfacher. Die Dioden sind nicht nötig, man muss nur die beiden Zenerdioden entgegengesetzt in Reihe schalten. In Durchlassrichtung funktioniert die Zenerdiode letztich wie eine normale Diode.
Zu den Transistorschaltungen: hier läuft der Fahrstrom auch über 3 p-n Übergänge (einer in der Diode und 2 im Transistor), somit wird auch hier zunächst Mal die Anfahrspannung um ca. 2 Volt hochgesetzt.
Gruß Engelbert
Zum Seitenanfang
© by 1zu160.net; Stand: 20. 05. 2024; Seitenaufrufe laufender Monat: 165; Vormonat: 228;